딥 스페이스 1호는 미래 우주 임무에 필요한 기술 개발 및 검증을 위해 제작된 NASA의 우주선이다. 1998년 10월 델타 II 로켓으로 발사되어, 이온 엔진, 자율 항법 시스템, 소형 통합 카메라 및 이미징 분광계(MICAS) 등 12가지 첨단 기술을 시험했다. 주요 목표는 이온 엔진의 성공적인 작동을 입증하는 것이었으며, 소행성 브라유와 혜성 보렐리를 근접 비행하며 과학 데이터를 수집했다. 딥 스페이스 1호는 여러 기술적 성과를 달성했고, 2001년 12월 임무를 종료했으며, 현재는 태양 주위를 공전하고 있다.
더 읽어볼만한 페이지
1998년 우주 개발 - 존 글렌 존 글렌은 미국의 우주비행사이자 정치인으로, 1962년 최초로 지구 궤도 비행을 한 미국인이며, 해병대 조종사, 시험 조종사, NASA 우주비행사로서 활약했고, 이후 오하이오주 상원의원을 지냈으며, 77세에 두 번째 우주 비행을 한 인물이다.
1998년 우주 개발 - 자랴 모듈 자랴 모듈은 국제 우주 정거장의 초기 모듈로서 전력 공급, 추진, 저장 공간 등의 핵심 기능을 제공하며 러시아 궤도 구역과 미국 궤도 구역을 연결하는 중요한 구성 요소이다.
1998년 발사한 우주선 - STS-88 STS-88 미션은 1998년 엔데버 우주왕복선에 의해 국제 우주 정거장 조립을 위해 수행된 최초의 비행으로, 유니티 모듈을 자랴 모듈에 연결하고 세 차례의 선외 활동을 통해 모듈 연결 및 시스템 활성화를 수행하여 국제 우주 정거장 건설의 중요한 시작을 알렸다.
혜성 탐사선 - EPOXI EPOXI는 NASA의 확장 임무로, 딥 임팩트 탐사선을 활용하여 혜성 탐사(DIXI)와 외계 행성 관측(EPOCh)을 수행했으며, 2010년 하틀리 2 혜성 근접 비행을 통해 혜성 핵을 관측하고 외계 행성들의 분광학적 관측을 진행했다.
혜성 탐사선 - 율리시스 (우주선) 유럽우주국이 설계하고 도르니어 시스템즈가 제작한 율리시스는 태양 극지방 관측을 목적으로 1990년에 발사되어 목성의 스윙바이 기동을 통해 태양 극궤도에 진입, 1994년부터 2008년까지 태양풍, 자기장, 우주선 등 다양한 우주 현상을 관측하고 여러 혜성의 꼬리를 통과하며 자료를 확보, 태양 극지방 자기장 변화, 심우주 먼지 양, 감마선 폭발 위치 측정 등에 기여한 후 18년간의 임무를 마치고 2009년 운용이 종료되었다.
''딥 스페이스 1호''는 미래 임무를 위한 기술 개발 및 검증을 목적으로 하였으며, 다음 12가지 기술이 시험되었다.[4]
'''태양 전지 추진''' : SCARLET(Solar Concentrator Array with Refractive Linear Element Technology, 굴절 선형 소자 기술을 사용한 태양 집중 배열)이라는 새로운 태양 전지판 기술을 통해 생산되었다.[6] 이 기술은 선형 프레넬 렌즈를 사용하여 태양광을 태양 전지에 집중시키는 방식이다.[6] ABLE 엔지니어링이 집중 기술을 개발하고 DS1용 태양 전지판을 제작했으며, 프레넬 광학 장치를 공급한 Entech Inc.와 NASA 글렌 연구 센터가 참여했다.[6] 이 기술은 원래 탄도 미사일 방어 기구의 후원을 받아 SSI - Conestoga 1620 페이로드 METEOR를 위해 개발되었다.[6] 임무 발사 당시 최첨단 기술이었던 GaAs 태양 전지보다 성능이 뛰어난 이중 접합 태양 전지와 집중 렌즈 기술이 결합되었다.[6] SCARLET 배열은 1 AU 거리에서 2.5 킬로와트의 전력을 생산했으며, 기존 배열보다 크기와 무게가 작았다.
'''다기능 구조'''
'''소형 통합 카메라 및 이미징 분광계(MICAS)''' : 가시광선 이미징과 적외선 및 자외선 분광법을 결합하여 화학적 조성을 결정했다. 모든 채널은 탄화 규소 거울을 사용하는 10cm 망원경을 공유한다. PEPE와 MICAS는 모두 다른 우주선에 탑재된 더 큰 장비 또는 장비 세트와 유사한 성능을 가지고 있었다. 이들은 이전 임무에 사용된 장비보다 더 작고 전력 소비가 적도록 설계되었다.
'''이온 및 전자 분광계(PEPE)''' : 목표 지점에 도달하면 PEPE (행성 탐사를 위한 플라즈마 실험) 장비로 입자 환경을 감지했다. 이 장비는 이온과 전자의 에너지 및 방향에 따른 플럭스를 측정했다. 이온의 조성은 비행 시간 질량 분석기를 사용하여 결정되었다.
'''소형 심우주 트랜스폰더(SDST)''' : 소형 심우주 트랜스폰더 소형 경량 무선 통신 시스템이다. 소형 부품을 사용하며, Ka 밴드를 통해 통신할 수 있다. 이 밴드는 현재 심우주 임무에서 사용되는 밴드보다 주파수가 높기 때문에 더 작은 장비를 사용하여 우주와 지상에서 동일한 양의 데이터를 보낼 수 있다. 기존의 DSN 안테나는 더 많은 임무 간에 시간을 분할할 수 있다. 발사 당시 DSN에는 실험적으로 소수의 Ka 수신기가 설치되어 있었다. Ka 운영 및 임무가 증가하고 있다.[11] SDST는 나중에 화성 과학 실험실(화성 탐사 로버 ''큐리오시티'')과 같은 다른 우주 임무에도 사용되었다.[11]
'''Ka 대역 고체 전력 증폭기'''
'''비콘 모니터 운영''' : 딥 스페이스 1호의 부담을 줄이는 방법 중 하나는 비컨 모니터 실험이다. 임무의 긴 순항 기간 동안 우주선의 작동은 본질적으로 중단되었다. 딥 스페이스 1호는 데이터 대신 미리 결정된 주파수에서 반송파 신호를 전송했다. 데이터를 해독하지 않고도 반송파는 훨씬 더 간단한 지상 안테나와 수신기로 감지할 수 있었다. DS1이 이상 현상을 감지하면 긴급성에 따라 네 개의 톤 사이에서 반송파를 변경했다. 그런 다음 지상 수신기는 운영자에게 DSN 자원을 전환하라고 신호를 보냈다. 이를 통해 숙련된 운영자와 값비싼 하드웨어가 정상적으로 작동하는 부담 없는 임무를 감시하는 것을 방지했다. 유사한 시스템이 ''뉴 호라이즌스'' 명왕성 탐사선에서 목성에서 명왕성까지 10년 동안의 순항 동안 비용을 절감하는 데 사용되었다.
'''자율 원격 에이전트 (Remote Agent)''' : 미국 NASA 에임스 연구 센터와 제트 추진 연구소에서 개발한 원격 지능형 자가 수리 소프트웨어로, 인간의 감독 없이 우주선을 제어한 최초의 인공 지능 제어 시스템이었다.[9] 원격 에이전트는 내장된 REPL 환경을 통해 우주선 구성 요소의 온보드 활동을 계획하고 시뮬레이션된 오류를 정확하게 진단하고 대응하는 능력을 성공적으로 시연했다.[10] 자율 제어를 통해 미래의 우주선은 지구에서 더 멀리 떨어진 곳에서 운용할 수 있으며 심우주에서 더 정교한 과학 수집 활동을 수행할 수 있게 될 것이다. 원격 에이전트 소프트웨어의 구성 요소는 다른 NASA 임무를 지원하는 데 사용되었다. 원격 에이전트의 주요 구성 요소는 강력한 플래너(EUROPA), 계획 실행 시스템(EXEC), 모델 기반 진단 시스템(Livingstone)이었다.[10] EUROPA는 화성 탐사 로버의 지상 기반 플래너로 사용되었다. EUROPA II는 ''피닉스'' 화성 착륙선과 화성 과학 실험실을 지원하는 데 사용되었다. Livingstone2는 지구 관측 1호와 NASA 드라이든 비행 연구 센터의 F/A-18 호넷에서 실험으로 비행했다.
'''저전력 전자 장치'''
'''전력 구동 및 스위칭 모듈'''
'''자율 항법 (Autonav)''' : 오토내비(Autonav) 시스템은 미국 제트 추진 연구소가 개발했으며, 알려진 밝은 소행성의 이미지를 촬영한다.[5] 태양계 내부에 있는 소행성은 다른 천체와 비교하여 눈에 띄고 예측 가능한 속도로 움직인다.[5] 따라서 우주선은 별 배경을 가로질러 이러한 소행성을 추적하여 상대적인 위치를 결정할 수 있으며, 이는 이러한 시간 척도에서 고정된 것처럼 보인다.[5] 두 개 이상의 소행성은 우주선이 위치를 삼각 측량할 수 있게 해준다.[5] 시간상에서 두 개 이상의 위치는 우주선이 궤도를 결정할 수 있게 해준다.[5] 기존 우주선은 미국 항공우주국(NASA) 심우주 네트워크(DSN)의 송신자와의 상호 작용을 통해 추적되며, 이는 사실상 역 GPS이다.[5] 그러나 DSN 추적에는 많은 숙련된 운영자가 필요하며, DSN은 통신 네트워크로 사용되면서 과부하가 걸린다.[5] 오토내비의 사용은 임무 비용과 DSN 요구를 줄여준다.[5] 오토내비 시스템은 반대로 사용하여 우주선에 대한 천체의 위치를 추적할 수도 있다.[5] 이것은 과학 장비의 대상을 획득하는 데 사용된다.[5] 우주선은 대상의 대략적인 위치로 프로그래밍된다.[5] 초기 획득 후, 오토내비는 우주선의 자세 제어를 지휘하면서도 대상을 프레임 내에 유지한다.[5] 오토내비를 사용한 다음 우주선은 ''딥 임팩트''였다.[5]
'''NASA 태양 기술 적용 준비(NSTAR) 이온 엔진''' : 1950년대 후반부터 NASA에서 개발되었지만, 1960년대의 SERT 임무를 제외하고는 미국의 우주선에서 비행으로 시연되지 않았다. 반면 수백 개의 홀 효과 엔진은 소련과 러시아 우주선에서 사용되었다. 이러한 우주에서의 성능 기록 부족은 추진제 질량 절감 가능성에도 불구하고, 이 기술이 고비용 임무에 사용하기에는 너무 실험적이라고 간주되게 했다. 게다가 이온 추진의 예상치 못한 부작용이 전자기장 및 입자 측정과 같은 전형적인 과학 실험을 방해할 수도 있었다. 따라서, 과학 임무에서 이온 추력기의 장기간 사용을 보여주는 것이 ''딥 스페이스 1'' 시연의 주요 임무였다.[7] NASA 태양 기술 적용 준비(NSTAR)의 전기 이온 추력기는 NASA 글렌 연구소에서 개발되었으며, 비추력 1,000~3,000초를 달성한다. 이는 기존의 우주 추진 방식보다 한 자릿수 높은 수치로, 질량을 약 절반 정도 절감하는 결과를 가져온다. 이는 훨씬 저렴한 발사체를 가능하게 한다. 이 엔진은 최대 전력(딥 스페이스 1에서는 2,100 W)에서 92 mN의 추력만을 생성하지만, 이온 엔진이 장기간 지속적으로 추력을 가하기 때문에 우주선은 높은 속도를 낼 수 있었다.[7] NSTAR 엔진을 사용한 다음 우주선은 세 개의 여분 장치를 갖춘 ''돈''이었다.[8]
2. 1. 태양 전지 추진
딥 스페이스 1호의 주요 동력은 SCARLET(Solar Concentrator Array with Refractive Linear Element Technology, 굴절 선형 소자 기술을 사용한 태양 집중 배열)이라는 새로운 태양 전지판 기술을 통해 생산되었다.[6] 이 기술은 선형 프레넬 렌즈를 사용하여 태양광을 태양 전지에 집중시키는 방식이다.[6] ABLE 엔지니어링이 집중 기술을 개발하고 DS1용 태양 전지판을 제작했으며, 프레넬 광학 장치를 공급한 Entech Inc.와 NASA 글렌 연구 센터가 참여했다.[6] 이 기술은 원래 탄도 미사일 방어 기구의 후원을 받아 SSI - Conestoga 1620 페이로드 METEOR를 위해 개발되었다.[6]
임무 발사 당시 최첨단 기술이었던 GaAs 태양 전지보다 성능이 뛰어난 이중 접합 태양 전지와 집중 렌즈 기술이 결합되었다.[6] SCARLET 배열은 1 AU 거리에서 2.5 킬로와트의 전력을 생산했으며, 기존 배열보다 크기와 무게가 작았다.
2. 2. 다기능 구조
이 부분에 대한 내용은 현재 비어 있다.
2. 3. 소형 통합 카메라 및 이미징 분광계 (MICAS)
소형 통합 카메라 및 분광계(MICAS) 장비는 가시광선 이미징과 적외선 및 자외선 분광법을 결합하여 화학적 조성을 결정했다. 모든 채널은 탄화 규소 거울을 사용하는 10cm 망원경을 공유한다. PEPE와 MICAS는 모두 다른 우주선에 탑재된 더 큰 장비 또는 장비 세트와 유사한 성능을 가지고 있었다. 이들은 이전 임무에 사용된 장비보다 더 작고 전력 소비가 적도록 설계되었다.
2. 4. 이온 및 전자 분광계 (PEPE)
딥 스페이스 1호는 목표 지점에 도달하면 PEPE (행성 탐사를 위한 플라즈마 실험) 장비로 입자 환경을 감지했다. 이 장비는 이온과 전자의 에너지 및 방향에 따른 플럭스를 측정했다. 이온의 조성은 비행 시간 질량 분석기를 사용하여 결정되었다.
2. 5. 소형 심우주 트랜스폰더 (SDST)
소형 심우주 트랜스폰더(SDST)는 소형 경량 무선 통신 시스템이다. 소형 부품을 사용하며, Ka 밴드를 통해 통신할 수 있다. 이 밴드는 현재 심우주 임무에서 사용되는 밴드보다 주파수가 높기 때문에 더 작은 장비를 사용하여 우주와 지상에서 동일한 양의 데이터를 보낼 수 있다. 기존의 DSN 안테나는 더 많은 임무 간에 시간을 분할할 수 있다. 발사 당시 DSN에는 실험적으로 소수의 Ka 수신기가 설치되어 있었다. Ka 운영 및 임무가 증가하고 있다.[11]
SDST는 나중에 화성 과학 실험실(화성 탐사 로버 ''큐리오시티'')과 같은 다른 우주 임무에도 사용되었다.[11]
2. 6. Ka 대역 고체 전력 증폭기
Ka 대역 고체 전력 증폭기에 대한 내용은 현재 작성되지 않았다.
2. 7. 비콘 모니터 운영
딥 스페이스 1호의 부담을 줄이는 방법 중 하나는 비컨 모니터 실험이다. 임무의 긴 순항 기간 동안 우주선의 작동은 본질적으로 중단되었다. 딥 스페이스 1호는 데이터 대신 미리 결정된 주파수에서 반송파 신호를 전송했다. 데이터를 해독하지 않고도 반송파는 훨씬 더 간단한 지상 안테나와 수신기로 감지할 수 있었다. DS1이 이상 현상을 감지하면 긴급성에 따라 네 개의 톤 사이에서 반송파를 변경했다. 그런 다음 지상 수신기는 운영자에게 DSN 자원을 전환하라고 신호를 보냈다. 이를 통해 숙련된 운영자와 값비싼 하드웨어가 정상적으로 작동하는 부담 없는 임무를 감시하는 것을 방지했다. 유사한 시스템이 ''뉴 호라이즌스'' 명왕성 탐사선에서 목성에서 명왕성까지 10년 동안의 순항 동안 비용을 절감하는 데 사용되었다.
2. 8. 자율 원격 에이전트 (Remote Agent)
원격 에이전트(RAX)는 미국 NASA 에임스 연구 센터와 제트 추진 연구소에서 개발한 원격 지능형 자가 수리 소프트웨어로, 인간의 감독 없이 우주선을 제어한 최초의 인공 지능 제어 시스템이었다.[9] 원격 에이전트는 내장된 REPL 환경을 통해 우주선 구성 요소의 온보드 활동을 계획하고 시뮬레이션된 오류를 정확하게 진단하고 대응하는 능력을 성공적으로 시연했다.[10] 자율 제어를 통해 미래의 우주선은 지구에서 더 멀리 떨어진 곳에서 운용할 수 있으며 심우주에서 더 정교한 과학 수집 활동을 수행할 수 있게 될 것이다. 원격 에이전트 소프트웨어의 구성 요소는 다른 NASA 임무를 지원하는 데 사용되었다. 원격 에이전트의 주요 구성 요소는 강력한 플래너(EUROPA), 계획 실행 시스템(EXEC), 모델 기반 진단 시스템(Livingstone)이었다.[10] EUROPA는 화성 탐사 로버의 지상 기반 플래너로 사용되었다. EUROPA II는 ''피닉스'' 화성 착륙선과 화성 과학 실험실을 지원하는 데 사용되었다. Livingstone2는 지구 관측 1호와 NASA 드라이든 비행 연구 센터의 F/A-18 호넷에서 실험으로 비행했다.
2. 9. 저전력 전자 장치
저전력 전자 장치는 딥 스페이스 1호에 탑재된 기능이다.
2. 10. 전력 구동 및 스위칭 모듈
wikitable
전력 구동 및 스위칭 모듈 관련 내용
2. 11. 자율 항법 (Autonav)
오토내비(Autonav) 시스템은 미국 제트 추진 연구소가 개발했으며, 알려진 밝은 소행성의 이미지를 촬영한다.[5] 태양계 내부에 있는 소행성은 다른 천체와 비교하여 눈에 띄고 예측 가능한 속도로 움직인다.[5] 따라서 우주선은 별 배경을 가로질러 이러한 소행성을 추적하여 상대적인 위치를 결정할 수 있으며, 이는 이러한 시간 척도에서 고정된 것처럼 보인다.[5] 두 개 이상의 소행성은 우주선이 위치를 삼각 측량할 수 있게 해준다.[5] 시간상에서 두 개 이상의 위치는 우주선이 궤도를 결정할 수 있게 해준다.[5]
기존 우주선은 미국 항공우주국(NASA) 심우주 네트워크(DSN)의 송신자와의 상호 작용을 통해 추적되며, 이는 사실상 역 GPS이다.[5] 그러나 DSN 추적에는 많은 숙련된 운영자가 필요하며, DSN은 통신 네트워크로 사용되면서 과부하가 걸린다.[5] 오토내비의 사용은 임무 비용과 DSN 요구를 줄여준다.[5]
오토내비 시스템은 반대로 사용하여 우주선에 대한 천체의 위치를 추적할 수도 있다.[5] 이것은 과학 장비의 대상을 획득하는 데 사용된다.[5] 우주선은 대상의 대략적인 위치로 프로그래밍된다.[5] 초기 획득 후, 오토내비는 우주선의 자세 제어를 지휘하면서도 대상을 프레임 내에 유지한다.[5] 오토내비를 사용한 다음 우주선은 ''딥 임팩트''였다.[5]
2. 12. NSTAR 이온 엔진
이온 엔진은 1950년대 후반부터 NASA에서 개발되었지만, 1960년대의 SERT 임무를 제외하고는 미국의 우주선에서 비행으로 시연되지 않았다. 반면 수백 개의 홀 효과 엔진은 소련과 러시아 우주선에서 사용되었다. 이러한 우주에서의 성능 기록 부족은 추진제 질량 절감 가능성에도 불구하고, 이 기술이 고비용 임무에 사용하기에는 너무 실험적이라고 간주되게 했다. 게다가 이온 추진의 예상치 못한 부작용이 전자기장 및 입자 측정과 같은 전형적인 과학 실험을 방해할 수도 있었다. 따라서, 과학 임무에서 이온 추력기의 장기간 사용을 보여주는 것이 ''딥 스페이스 1'' 시연의 주요 임무였다.[7]
NASA 태양 기술 적용 준비(NSTAR)의 전기 이온 추력기는 NASA 글렌 연구소에서 개발되었으며, 비추력 1,000~3,000초를 달성한다. 이는 기존의 우주 추진 방식보다 한 자릿수 높은 수치로, 질량을 약 절반 정도 절감하는 결과를 가져온다. 이는 훨씬 저렴한 발사체를 가능하게 한다. 이 엔진은 최대 전력(딥 스페이스 1에서는 2,100 W)에서 92 mN의 추력만을 생성하지만, 이온 엔진이 장기간 지속적으로 추력을 가하기 때문에 우주선은 높은 속도를 낼 수 있었다.[7]
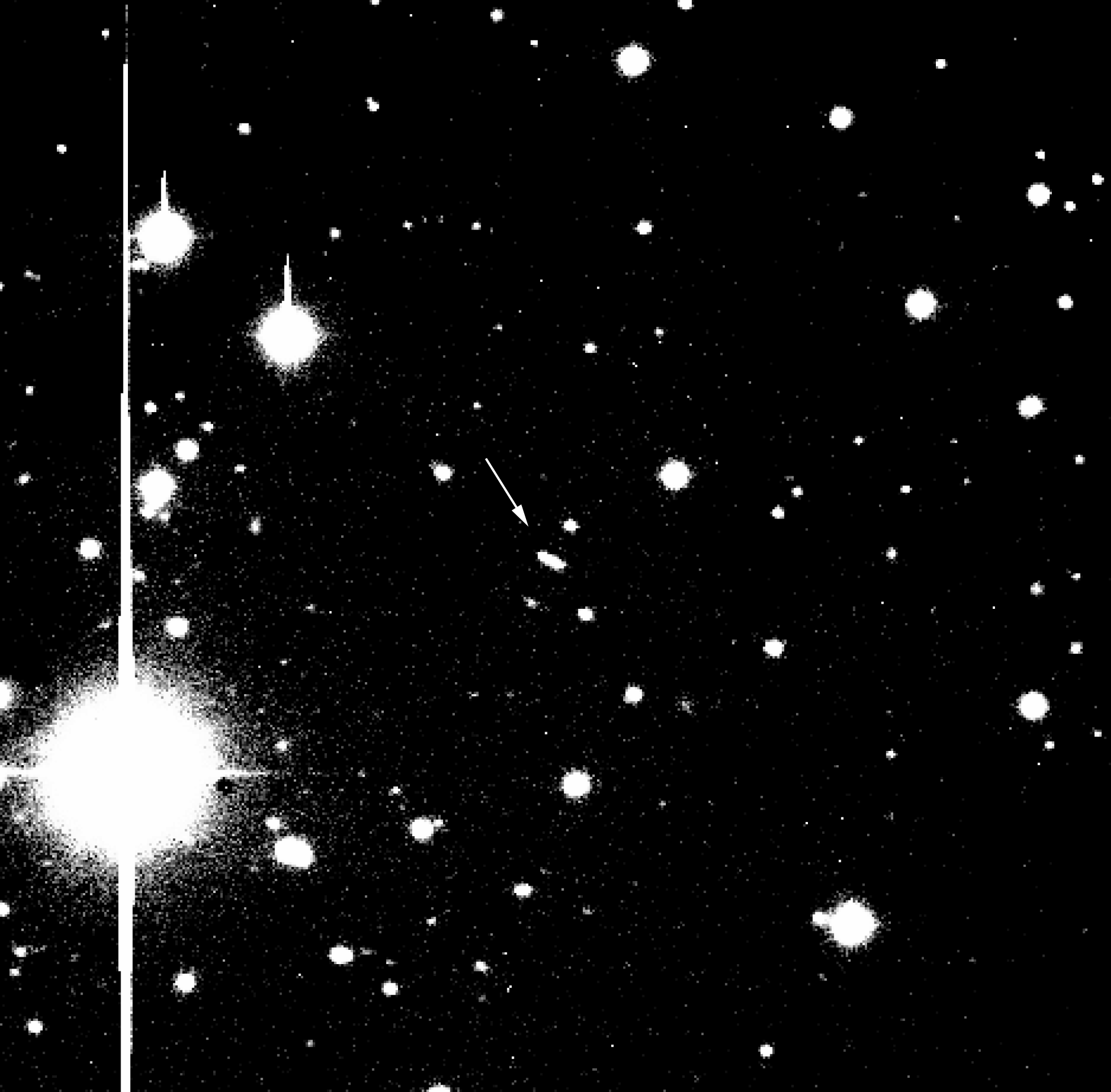
발사 전, ''딥 스페이스 1호''는 혜성 76P/웨스트-코호우텍-이케무라와 소행성 3352 맥컬리프를 방문할 예정이었다.[12] 발사 지연으로 인해 목표가 소행성 9969 브라유(당시 1992 KD로 불림)와 혜성 19P/보렐리로 변경되었고, 임무 초반의 성공에 따라 혜성 107P/윌슨-해링턴이 추가되었다.[16] 브라유에 대한 손상된 근접 비행을 달성했고, 스타 트래커 문제로 인해 혜성 19P/보렐리의 근접 비행을 유지하기 위해 윌슨-해링턴에 대한 목표 지정을 포기했으며, 이는 성공적으로 완료되었다.[16]
2002년 8월, 소행성 에 대한 또 다른 확장 임무의 근접 비행이 고려되었지만, 결국 비용 문제로 인해 진행되지 않았다.[13][14] 임무 수행 중 화성의 고품질 적외선 스펙트럼도 촬영되었다.[16][18]
: 9월 18일 - 당초 계획된 임무 종료. 연장 임무로서 (107P/ 4015) 윌슨-해링턴 혜성으로 향함(2001년 3월 플라이바이 예정).
: 11월 11일 - 항성 추적 장치가 고장나 윌슨-해링턴 혜성에 도달할 수 없게 됨.
;2000년
: 7월 - 목표를 (19P) 보렐리 혜성으로 변경.
;2001년
: 9월 22일 - 보렐리 혜성에서 2171킬로미터 이내를 초속 16.5킬로미터로 플라이바이.
:: 혜성 탐사를 상정하고 설계되지 않았기 때문에 먼지와의 충돌 등이 우려되었으나, 무사히 핵 촬영 등에 성공했다. 혜성핵 촬영은 유럽 우주국(ESA)의 지오토의 핼리 혜성 탐사 이래로, 사상 2번째이다.
: 12월 18일 : 이온 엔진을 정지하고 미션을 종료.
:: 보렐리 혜성 접근 후에도 활동이 가능했기 때문에 일부 연구자들 사이에서는 더욱 아모르군 소행성 탐사를 하는 것도 검토되었지만 실현되지 않았다.
3. 1. 주요 성과
딥 스페이스 1호는 이온 추진 엔진의 성공적인 작동, 별 추적기 고장 후 MICAS 카메라를 이용한 임무 수행, Autonav 시스템의 자율적인 문제 해결 능력 입증 등 여러 기술적 성과를 달성했다.[16] 초기 이온 추진 엔진의 문제는 전기 아킹으로 해결되었으며,[15] PEPE 탐지기는 엔진 배기가스가 다른 시스템에 미치는 영향이 없음을 확인했다.
9969 브라유 근접 비행은 부분적인 성공에 그쳤는데, 기술적 문제와 낮은 알베도로 인해 선명한 이미지를 얻는 데 실패했다.[16] 그러나 보렐리 혜성 근접 비행은 매우 성공적이었으며, 지오토가 촬영한 핼리 혜성보다 더 높은 해상도의 혜성 표면 이미지를 획득했다.[17] PEPE 기기는 혜성의 태양풍 상호작용이 핵에서 벗어났음을 보고했으며, 이는 혜성 표면 제트의 불균일한 분포 때문으로 여겨진다.
파편 방어막이 없음에도 혜성 통과에 성공한 딥 스페이스 1호는 이후 이온 엔진 시스템 재테스트를 위한 확장 임무를 수행했다.[17] 1999년 10월과 11월에는 MICAS 기기를 이용해 화성을 관측하여 적외선 스펙트럼을 촬영했다.[16][18]
주요 일정은 다음과 같다:
1998년
* 10월 24일 - 델타 로켓으로 발사.
1999년
* 7월 29일 - 9969 브라이유 플라이바이. 최단 접근 거리 29km.
* 9월 18일 - 당초 계획된 임무 종료. 윌슨-해링턴 혜성으로 연장 임무 수행 (2001년 3월 플라이바이 예정).
* 11월 11일 - 항성 추적 장치 고장으로 윌슨-해링턴 혜성 도달 불가능.
2000년
* 7월 - 보렐리 혜성으로 목표 변경.
2001년
* 9월 22일 - 보렐리 혜성에서 2171km 이내를 초속 16.5km로 플라이바이. 유럽 우주국(ESA)의 지오토 이후 사상 2번째 혜성핵 촬영 성공.
* 12월 18일 - 이온 엔진 정지 및 임무 종료. 아모르군 소행성 탐사 검토는 실현되지 않음.
4. 임무 연표
]]
딥 스페이스 1호는 발사 전, 혜성 76P/웨스트-코호우텍-이케무라와 소행성 3352 맥컬리프를 방문할 예정이었다.[12] 그러나 발사 지연으로 인해 목표가 소행성 9969 브라유(당시 1992 KD로 불림)와 혜성 19P/보렐리로 변경되었다.[16] 임무 초반의 성공에 따라 혜성 107P/윌슨-해링턴이 추가되었으나,[16] 브라유에 대한 탐사 진행과 스타 트래커 문제로 인해 혜성 19P/보렐리의 근접 비행을 유지하기 위해 윌슨-해링턴에 대한 목표 지정은 포기되었다.[16] 2002년 8월에는 소행성 에 대한 확장 임무 근접 비행이 고려되었지만, 비용 문제로 인해 진행되지 않았다.[13][14] 임무 수행 중 화성의 고품질 적외선 스펙트럼도 촬영되었다.[16][18]
9월 18일 - 당초 계획된 임무 종료. 연장 임무로서 107P/윌슨-해링턴으로 향했다(2001년 3월 플라이바이 예정).
11월 11일 - 항성 추적 장치가 고장나 윌슨-해링턴 혜성에 도달할 수 없게 되었다.
2000년
7월 - 목표를 19P/보렐리로 변경.
2001년
9월 22일 - 보렐리 혜성에서 2171km 이내를 초속 16.5km로 플라이바이. 혜성 탐사를 상정하고 설계되지 않았기 때문에 먼지와의 충돌 등이 우려되었으나, 무사히 핵 촬영 등에 성공했다. 혜성핵 촬영은 유럽 우주국(ESA)의 지오토의 핼리 혜성 탐사 이래로, 사상 2번째이다.
12월 18일 : 이온 엔진을 정지하고 미션을 종료. 보렐리 혜성 접근 후에도 활동이 가능했기 때문에 일부 연구자들 사이에서는 더욱 아모르군 소행성 탐사를 하는 것도 검토되었지만 실현되지 않았다.
5. 현황
딥 스페이스 1호는 주요 목표와 부차적 목표를 성공적으로 달성하여 귀중한 과학 데이터와 이미지를 반환했다. 딥 스페이스 1호의 이온 엔진은 2001년 12월 18일 약 20:00:00 UTC에 종료되었으며, 이는 임무의 종료를 알렸다.[2] 우주선의 통신 장비는 추후 필요할 경우를 대비하여 활성 모드로 유지되었다. 그러나 2002년 3월에 통신 재개를 시도했으나 실패했다.[17] 딥 스페이스 1호는 태양 주위를 공전하며 태양계 내에 남아 있다.[2]
1998년 10월 24일 - 델타 로켓에 의해 발사되었다.
1999년 7월 29일 - 브라이유를 플라이바이 했으며, 최단 접근 거리는 29킬로미터였다. 같은 해 9월 18일 당초 계획된 임무가 종료되었고, 연장 임무로서 (107P/ 4015) 윌슨-해링턴 혜성으로 향할 예정이었으나(2001년 3월 플라이바이 예정), 11월 11일 항성 추적 장치가 고장나 윌슨-해링턴 혜성에 도달할 수 없게 되었다.
2000년 7월 - 목표를 (19P) 보렐리 혜성으로 변경하였다.
2001년 9월 22일 - 보렐리 혜성에서 2171킬로미터 이내를 초속 16.5킬로미터로 플라이바이 하였다. 혜성 탐사를 상정하고 설계되지 않았기 때문에 먼지와의 충돌 등이 우려되었으나, 무사히 핵 촬영 등에 성공했다. 혜성핵 촬영은 유럽 우주국(ESA)의 지오토의 핼리 혜성 탐사 이래로, 사상 2번째이다. 같은 해 12월 18일 이온 엔진을 정지하고 미션을 종료했다. 보렐리 혜성 접근 후에도 활동이 가능했기 때문에 일부 연구자들 사이에서는 더욱 아모르군 소행성 탐사를 하는 것도 검토되었지만 실현되지 않았다.
6. 통계
딥 스페이스 1호의 발사 질량은 486 kg이고, 건조 질량은 373 kg이다.[1] 연료는 자세 제어 추진기를 위한 히드라진 31 kg과 NSTAR 이온 엔진을 위한 제논 82 kg을 탑재했다.[1] 전력은 2,500 와트이며, 이 중 2,100 와트가 이온 엔진에 전원을 공급한다. 주 계약자는 스펙트럼 아스트로였으며, 이후 제너럴 다이내믹스를 거쳐 오비탈 사이언시스에 인수되었다. 발사체는 보잉 델타 II 7326이고, 케이프 커내버럴 공군 기지 제17A 발사 단지에서 발사되었다. 총 비용은 1억 4970만 달러이며, 개발 비용은 9480만 달러이다. 프로젝트 매니저는 데이비드 리만(David Lehman), 미션 매니저는 필립 바르게세(Philip Varghese), 수석 미션 엔지니어 및 부 미션 매니저는 마크 레이먼(Marc Rayman), 프로젝트 과학자는 로버트 넬슨(Robert Nelson)이다.
참조
[1]
웹사이트
Deep Space 1 Asteroid Flyby
http://www.jpl.nasa.[...]
NASA
1999-07-26
[2]
웹사이트
Deep Space 1
https://nssdc.gsfc.n[...]
NASA
2016-11-20
[3]
서적
Beyond Earth: A Chronicle of Deep Space Exploration, 1958–2016
https://www.nasa.gov[...]
NASA
[4]
웹사이트
Advanced Technologies
http://www.jpl.nasa.[...]
NASA/Jet Propulsion Laboratory
2016-11-20
[5]
conference
The Deep Space 1 Autonomous Navigation System: A Post-Flight Analysis
2000
[6]
conference
The Scarlet Solar Array: Technology Validation and Flight Results
http://nmp-techval-r[...]
2000
[7]
논문
Mision Design for Deep Space 1: A Low-thrust Technology Validation Mission
http://trs-new.jpl.n[...]
1999-08
[8]
웹사이트
Dawn: Spacecraft
http://dawn.jpl.nasa[...]
NASA/Jet Propulsion Laboratory
2016-11-20
[9]
웹사이트
Remote Agent
https://ti.arc.nasa.[...]
NASA
2009-04-22
[10]
AV media
The Remote Agent Experiment: Debugging Code from 60 Million Miles Away
https://www.youtube.[...]
Google Tech Talks
2012-02-14
[11]
웹사이트
Mars Science Laboratory Telecommunications System Design
http://descanso.jpl.[...]
NASA/Jet Propulsion Laboratory
2009-11
[12]
웹사이트
Comet Space Missions
http://spider.seds.o[...]
2016-11-20
[13]
간행물
End of the Line for NASA Probe
https://www.wired.co[...]
2001-12-18
[14]
웹사이트
Mission Update
http://nmp.jpl.nasa.[...]
NASA/Jet Propulsion Laboratory
2001-12-18
[15]
논문
Results from the Deep Space 1 Technology Validation Mission
http://trs-new.jpl.n[...]
2000-07
[16]
논문
The Deep Space 1 Extended Mission
http://nmp.jpl.nasa.[...]
2001-03
[17]
논문
The Successful Conclusion of the Deep Space 1 Mission: Important Results without a Flashy Title
http://www.jpl.nasa.[...]
2003
[18]
웹사이트
Deep Space 1: Mission Information
http://naif.jpl.nasa[...]
NASA
2003-09-29
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.